分体式步进电机驱动

产品简介
详细信息
DS-OLS2-FPD

准备工作
- 推荐使用电源电压输入范围(18~36VDC)
- 控制器、PLC或者控制板卡(带高速脉冲功能)
- 适配的步进电机,建议匹配两相四线制电机
电源连接
- 电源电压输入范围18~36VDC,推荐24V, 可以用在20mm、28mm、35mm和42mm系列。
- 电源正极"+" 连接驱动器VDC,负极"-"连接GND
In a environment, you can move left and right to see the contents (tables).
| 性能参数 | 最小值 | 额定值 | 值 | 单位 |
|---|---|---|---|---|
| 输出电流(峰值) | 0.3 | - | 2.2 | A |
| 输入电源电压 | 18VDC | 24VDC | 36VDC | V |
| 控制信号输入电流 | 7 | 10 | 16 | mA |
| 步进脉冲频率 | 0 | - | 200 | kHz |
| 最小脉冲宽度 | 2.5 | - | - | ㎲ |
| 最小的方向设置 | 5.0 | - | - | ㎲ |
| 绝缘电阻 | 100 | - | - | MΩ |
In a environment, you can move left and right to see the contents (tables).
| 冷却方式 | 自然冷却或强制风冷 | 额定值 |
|---|---|---|
| 使用环境 | 场合 | 不能放在其它发热的设备旁,要避免粉尘、油雾、腐蚀性气体, 湿度太大及强振动场所,禁止有可燃气体和导电灰尘; |
| 温度 | 0~50℃ [32~122°F] | |
| 湿度 | 40 ~ 90%RH | |
| 振动 | 10-50Hz / 0.15mm | |
| 保存温度 | -20°C ~ 65°C [-4°F ~ 149°F] | |
| 重量 | 大约 230g [8.8 oz] | |

DS-OLS4-FPD

准备工作
- 输入电压20~50VDC,建议采用非稳压型电源
- 控制器、PLC或者控制板卡(带高速脉冲功能)
- 适配的步进电机,建议匹配两相四线制电机
电源连接
- 电源电压输入范围20~50VDC,建议42mm、57mm和60mm系列使用24V
- 电源正极"+" 连接驱动器VDC,负极"-"连接GND
In a environment, you can move left and right to see the contents (tables).
| 性能参数 | 最小值 | 额定值 | 值 | 单位 |
|---|---|---|---|---|
| 输出电流(峰值) | 1.0 | - | 4.2 | A |
| 输入电源电压 | 20VDC | 24VDC/36VDC | 50VDC | V |
| 控制信号输入电流 | 7 | 10 | 16 | mA |
| 步进脉冲频率 | 0 | - | 200 | kHz |
| 最小脉冲宽度 | 2.5 | - | - | ㎲ |
| 最小的方向设置 | 5.0 | - | - | ㎲ |
| 绝缘电阻 | 100 | - | - | MΩ |
In a environment, you can move left and right to see the contents (tables).
| 冷却方式 | 自然冷却或强制风冷 | 额定值 |
|---|---|---|
| 使用环境 | 场合 | 不能放在其它发热的设备旁,要避免粉尘、油雾、腐蚀性气体, 湿度太大及强振动场所,禁止有可燃气体和导电灰尘; |
| 温度 | 0~50℃ [32~122°F] | |
| 湿度 | 40 ~ 90%RH | |
| 振动 | 10-50Hz / 0.15mm | |
| 保存温度 | -20°C ~ 65°C [-4°F ~ 149°F] | |
| 重量 | 大约 250g [8.8 oz] | |

DS-OLS8-FPD

准备工作
- 输入电压24~72VDC,建议采用非稳压型电源
- 控制器、PLC或者控制板卡(带高速脉冲功能)
- 适配的步进电机,建议匹配两相四线制电机
电源连接
- 电源电压输入范围24~72VDC,建议57mm、60mm和86mm系列使用
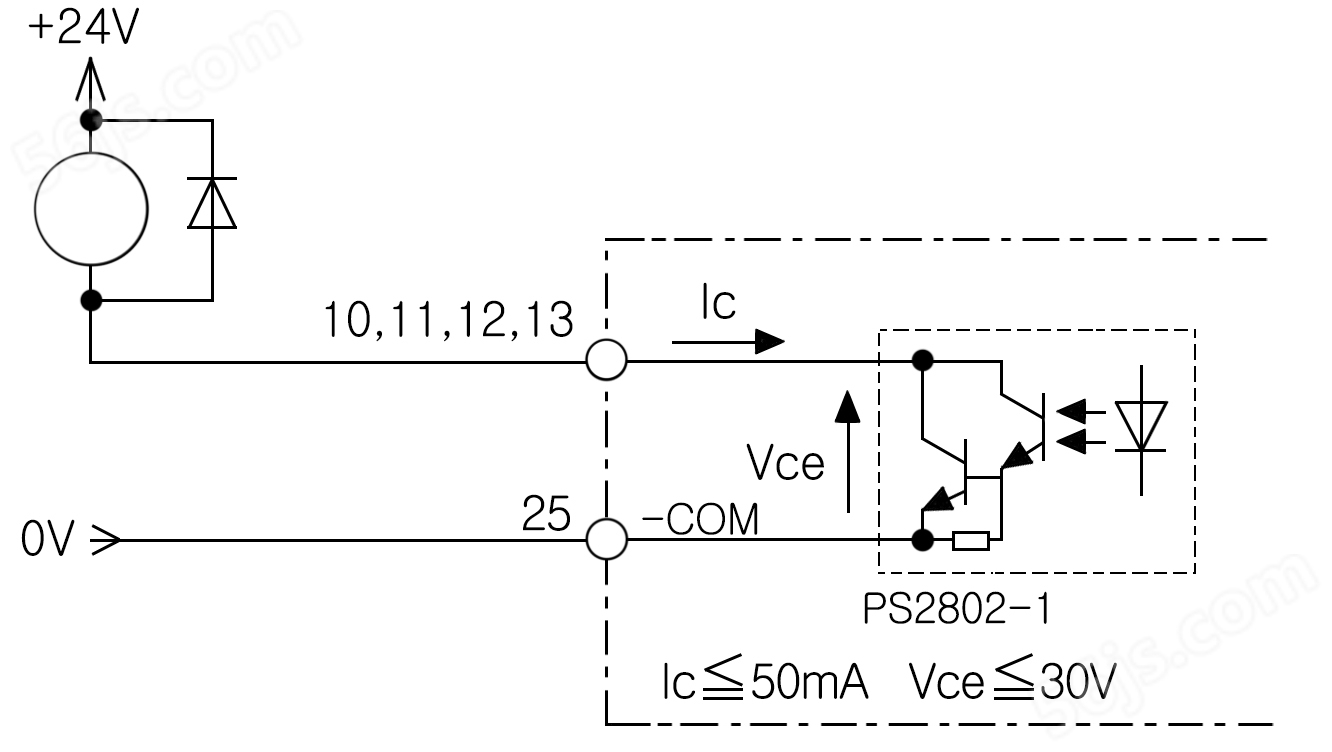
- 继电器连接 注意:继电器连接时,要求在继电器两端接二极管(如IN4000系列)
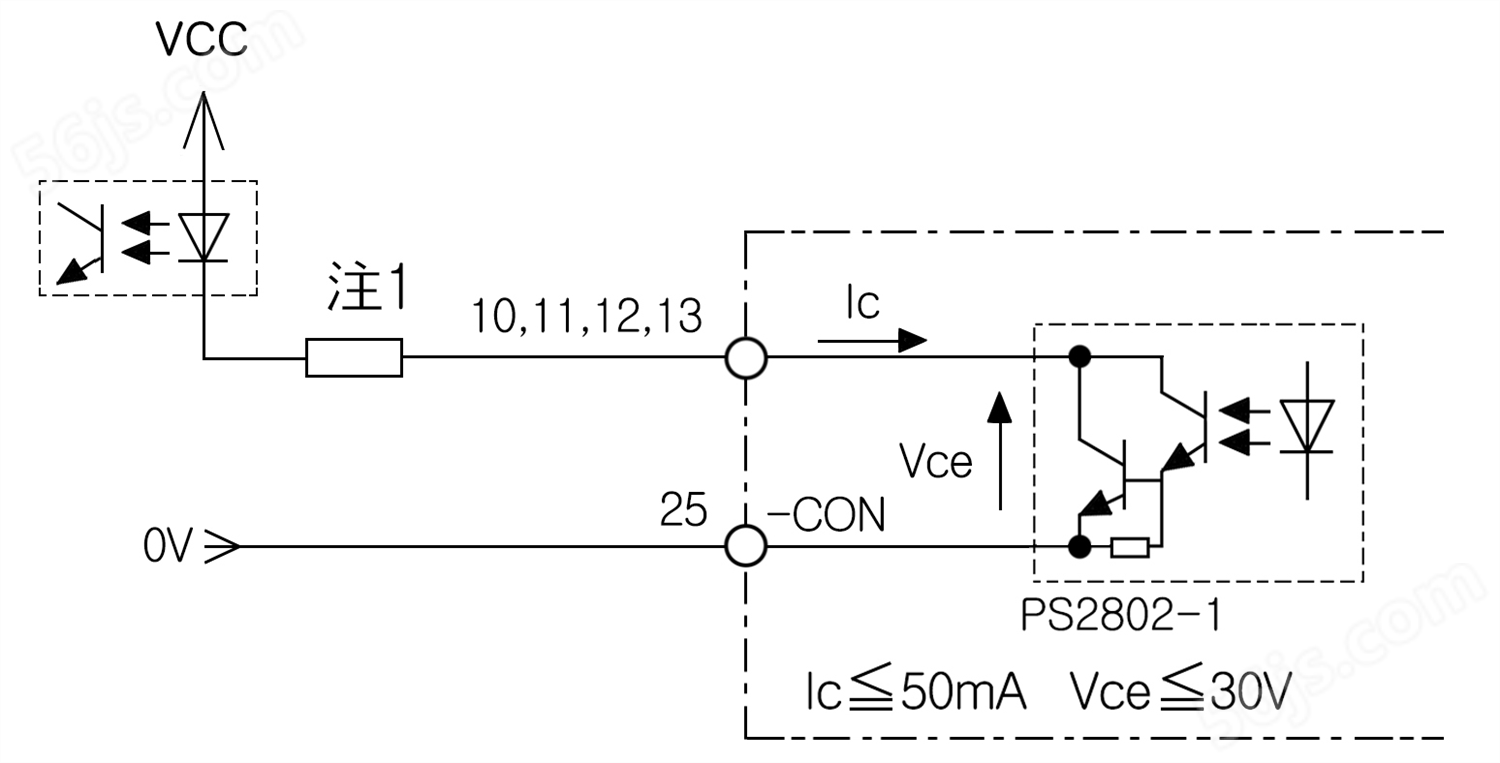
- 光耦连接 报警输出为光电隔离,承受电压30VDC,饱和电流50mA。 当驱动器正常工作时,输出闭合。
In a environment, you can move left and right to see the contents (tables).
| 驱动器型号 | DS-OLS8-FPD | |
|---|---|---|
| 适配电机 | 适配两相混合式步进电机, DS-OLS8-FPD适配7.8A | |
| 电源供电 | 24 - 72V DC | |
| 输出电流 | DS-OLS8-FPD:2.8A-7.8A/相(峰值)) | |
| 驱动方式 | 全桥双极性PWM驱动 | |
| 输入信号 | 脉冲信号 | 光耦输入电压H = 3.5 - 26V , L = 0 - 0.8V 导通电流6-15mA |
| 脱机信号 | ||
| 方向信号 | ||
| 输出信号 | 报警输出 | 光电隔离输出,承受电压30VDC,饱和电流50mA |
| 尺寸 | 118 × 78 × 34毫米 | |
| 重量 | 约300克 | |
| 使用环境 | 使用场合 | 避免粉尘,油雾及腐蚀性气体 |
| 湿度 | < 85="" %="" rh,=""> | |
| 温度 | 0°C - +40°C | |
| 散热 | 安装在通风环境中 | |

DS-CLS9-FRS4

概述
不受失步影响 步进闭环控制系统,解决了目前市场上开环步进电机常见的失步问题。
特性
1. 电机后面安装的编码器可以不断监测当前位置,并防止发生失步。如果由于外力或过载而出现失步,将向主控制器发送警报信号。主机控制器可以识别出已发生失步。
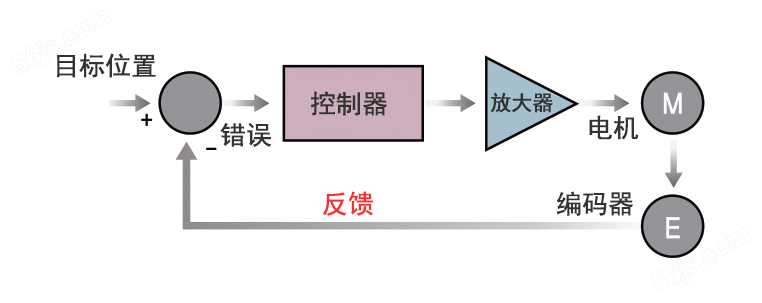
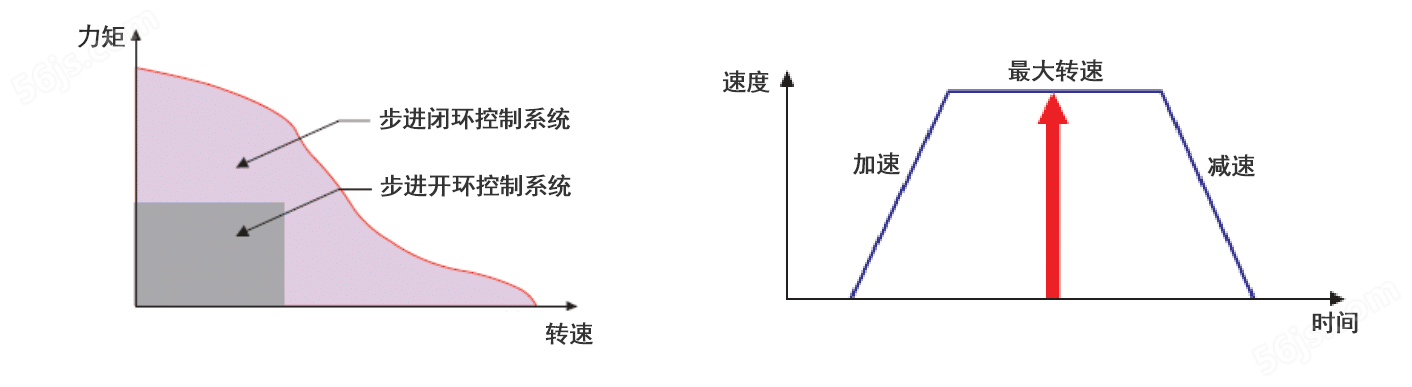
2. 高转矩与高转速 通过编码器反馈当前位置值,实现实时定位反馈,因此调整转矩来调整以匹配预期的速度与负载。
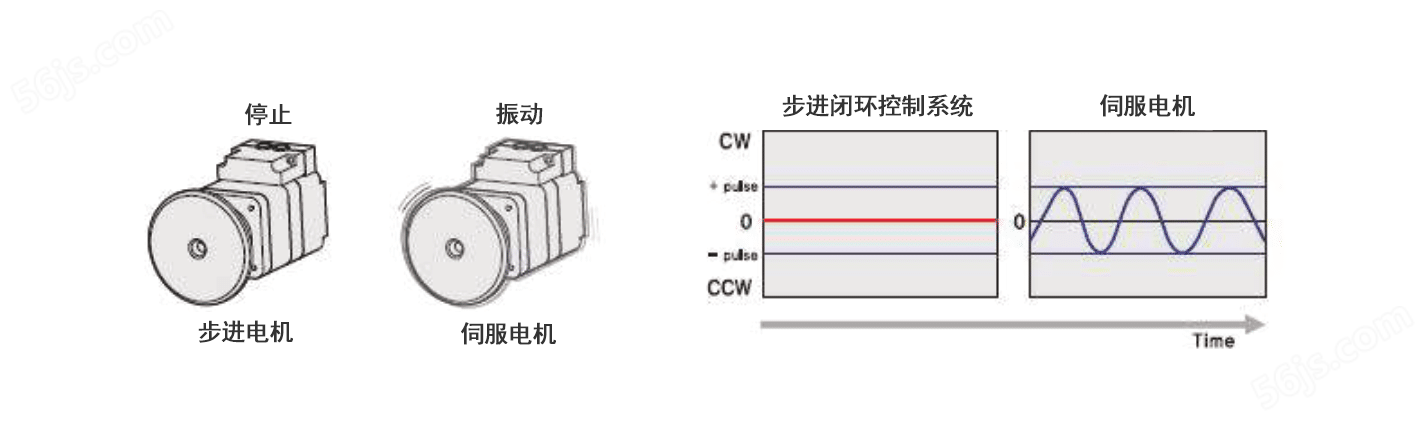
3. 停止未定不抖动 传统伺服电机停止时会有空振现象,会不断地进行补偿;而闭环步进系统,利用步进电机低速力矩性能,将其固定在位置,消除空针,尤其适用于视觉检测。
4. 放大电流加速特性 通过参数可提升内部电流设定,可设置到150%,实现高速时,加减速的特性提升。
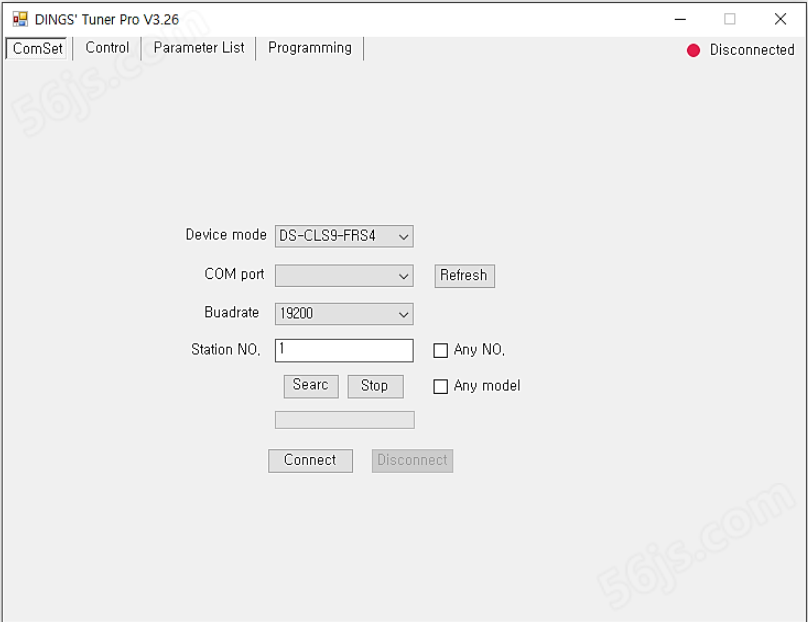
5. 上位控制多轴联动 通过RS-485通讯连接,实现上位多轴控制,支持16轴运动,通讯速率9600~19200bps。
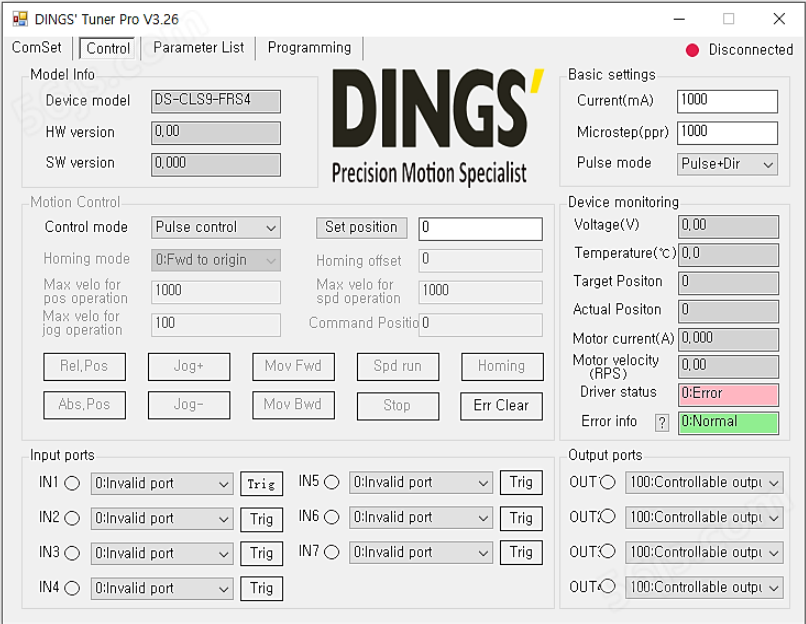
6. 多运动模式 步进闭环控制系统,位置模式、速度模式以及力矩模式。

7. 状态保护显示 通过控制系统,实现过流、超速、失步、过负载、接线错误等保护提示功能,以提高处理能力。
In a environment, you can move left and right to see the contents (tables).
| 项目 | 内容 | 备注 |
|---|---|---|
| 型号 | DS-CLS9-FRS4 | |
| 输入电源电压 | DC 24V~48V ±10% | |
| 额定输出电流 | 3.0A (0 -peak) | 连续电流 |
| 输出电流 | 4.5A (0 -peak) | 瞬间电流 |
| 控制对象电机 | 附编码器2相双极性步进电机 | |
| 驱动方式 | PWM恒流驱动 | |
| 通讯界面 | 输入 · 脉冲、方向输入(可配置为 数字输入) · 数字输入5个 · 编码器输入(A,B,Z) 输出 · 数字输出4个 · 编码信号输出 (差动A,B,Z) | 除了编码器输出为固定,其余 的输入/输出均可通过通讯自 由配置 |
| 数字输入详细内容 | /SV ON (Servo On) /RESET (报警复位) /START (电机启动/停止) /JOG (电机点动) /HOME (回零点) | |
| 数字输出详细内容 | /IN POTISION /ALARM | |
| LED 指示 | 状态、故障 | 2个指示灯 |
| 通讯I/F | RS485,最多32节点 | MODBUSRTU协议,波特 率:19200bps(预设)或根据 约定 |
| 控制方法 | 位置控制模式 | 根据脉冲定位、根据RS485通 讯定位 |
| 外形尺寸(mm) | W77×D134×H34 | 不含接线端子 |
| 重量 | 约500g | 不含接线端子 |
| 动作温度/湿度 | 0~45℃,85%RH以下 | 防止冷凝 |
| 保存温度 | 0~85℃,85%以下 | 防止冷凝 |
| 环境气体 | 防止腐蚀性气体 |
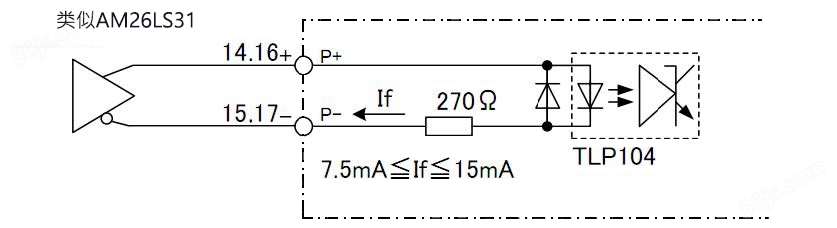
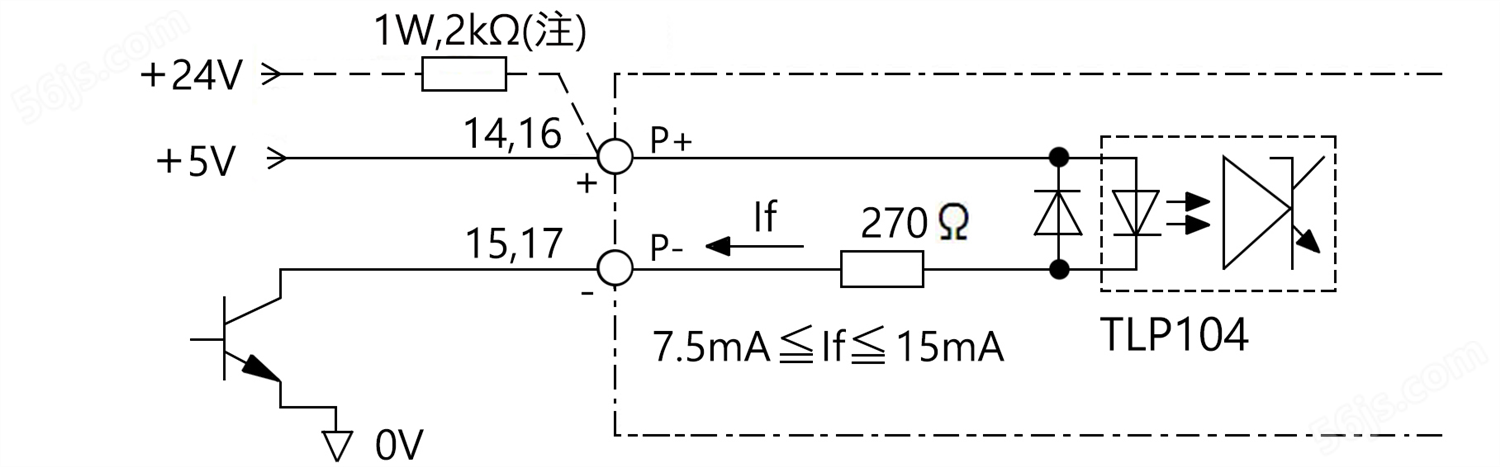
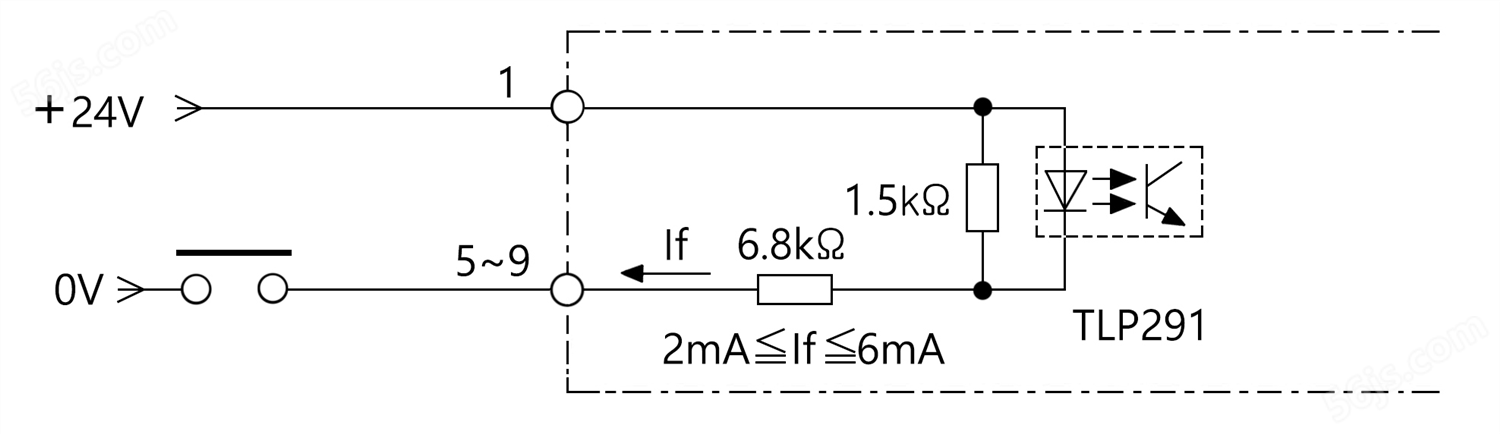
输入回路图

输出回路图


ST-484

概述
步进闭环控制系统,解决目前市场上开环步进电机常见的失步问题, 能够改善步进电机共振、噪音、干扰等问题,如同伺服驱动器一样实现位置、速度、力矩控制,即使在高速也能有较大的转矩输出。步进闭环控制系统弥补了开环步进的大多数不足,进一步提升了步进电机的使用性能。
特性
1. 不受失步影响.通过编码器反馈当前位置值,实现实时定位反馈,失步自动报警,解决传统开环式步进电机失步影响 ,结合形成闭环回路。
2. 高转矩与高速度.通过编码器反馈,实现电流实时补偿,使得电机性能大大提升,在高速度下也有较高的转矩,转速可达3000r/min。
3. 停止未定不抖动 传统伺服电机停止时会有空振现象,会不断地进行补偿;而闭环步进系统,利用步进电机低速力矩性能,将其固定在位置,消除空振,尤其适用于纳米技术、视觉检测、喷墨打印行业。
4. 放大电流加速特性 通过参数可提升内部电流设定,可设置到150%,实现高速时,加减速的特性提升。
5. 高分辨率编码器.高分辨率编码器,提高定位精度,重复定位可达0.001mm。
6. 上位控制多轴联动.通过RS-485(RS-232)通讯连接,实现上位多轴控制,支持16轴运动,通讯速率9600~19200bps。
7. 多运动模式.步进闭环控制系统,通过上位指令可实现三大主流运动控制,速度模式、位置模式以及力矩模式。
8. 外部I/O控制.通过PLC连接外部I/O口,发送数字信号,可直接对马达进行运动控制。
9. 支持微步运行.步进闭环控制系统支持1~16个等级的微步模式,运行更加平稳。
10. 状态保护显示.通过控制系统,实现过流、超速、失步、过负载、接线错误等保护提示功能,提高故障处理能力。
In a environment, you can move left and right to see the contents (tables).
| 电源输入电压 | 12~48VDC±10% |
| 运行电流 | 峰值电流4A |
| 停止电流 | 根据控制要求设定 |
| 转速 | 1500r/min |
| 编码器解析度 | 100~1024CPR |
| I/O | 3个数字量输入,1个模拟量输入,3个可编程输出 |
| 通讯 | USB Mini 9600~20000bps |
| LED显示 | 单灯多色状态显示 |
| 微步运行 | 1-256Microstep |
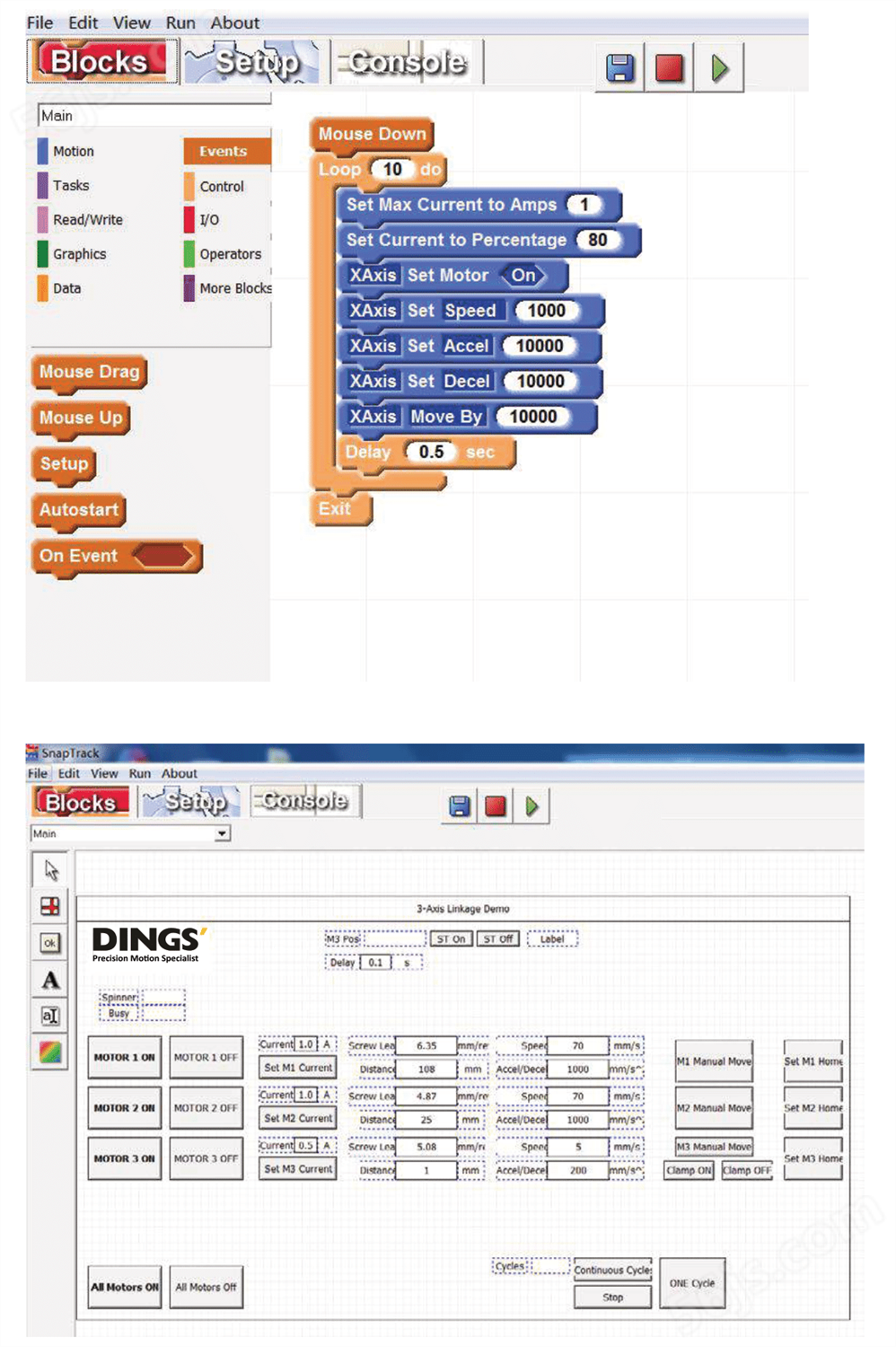
| 用户界面 | Windows 用户界面程序 |