品牌
生产厂家厂商性质
杭州市所在地
饲料全自动装车系统项目主要有以下设备构成:
1.激光传感器(用于车辆识别和测量);
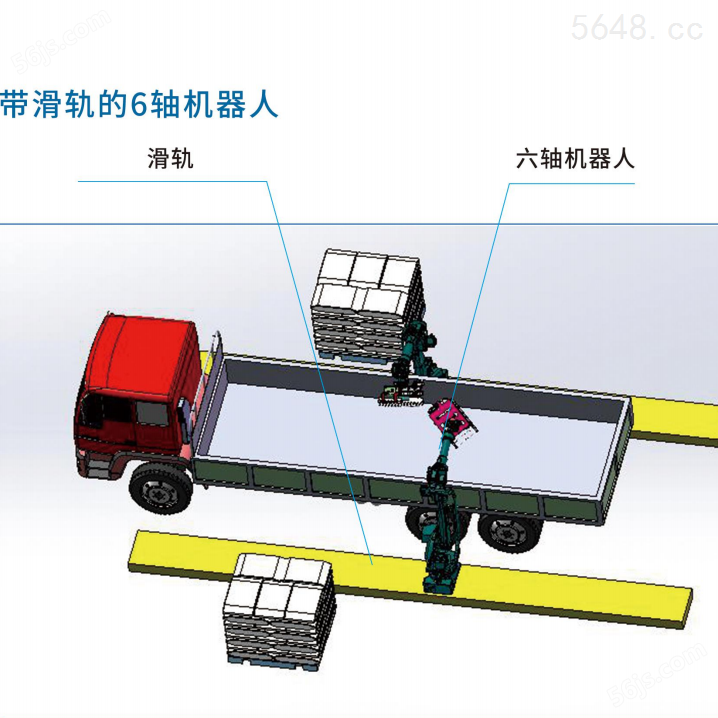
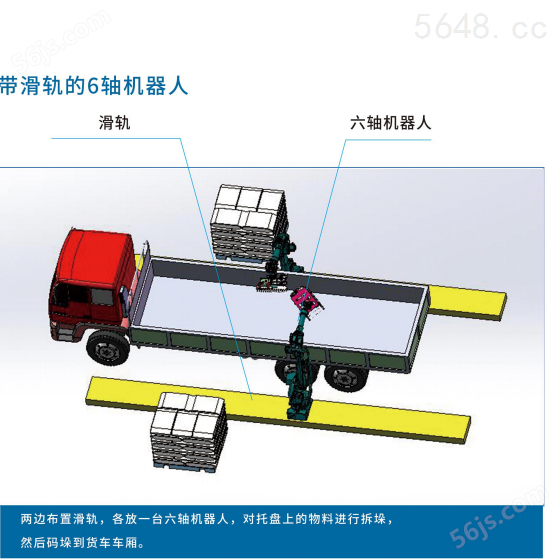
2.桁架机器人+抓手(主体设备);
3.视觉传感器(袋装料识别和定位);
4.主控系统

3D视觉定位,码垛更精细
高精度3D视觉传感器+抓取算法,可用于加工制造高精度物料上下料
根据袋/包点云信息实现高精度抓取和码垛,码垛精细,防止遛包垮跺
停车引导及位置偏差自适应
水平停偏
当车辆出现水平偏差,如左图所示,装车 机通过码垛小车行走偏移量来弥补停车位 的偏差,容许的偏移量为单边15cm。
角度停偏
当车辆出现角度偏差,如右图所示,装车 机通过激光扫描得出的角度偏差,以及车 身长宽高来计算偏差递增量,电控根据给 出的递增量,在容许偏差单边15cm内来 进行码垛计算。