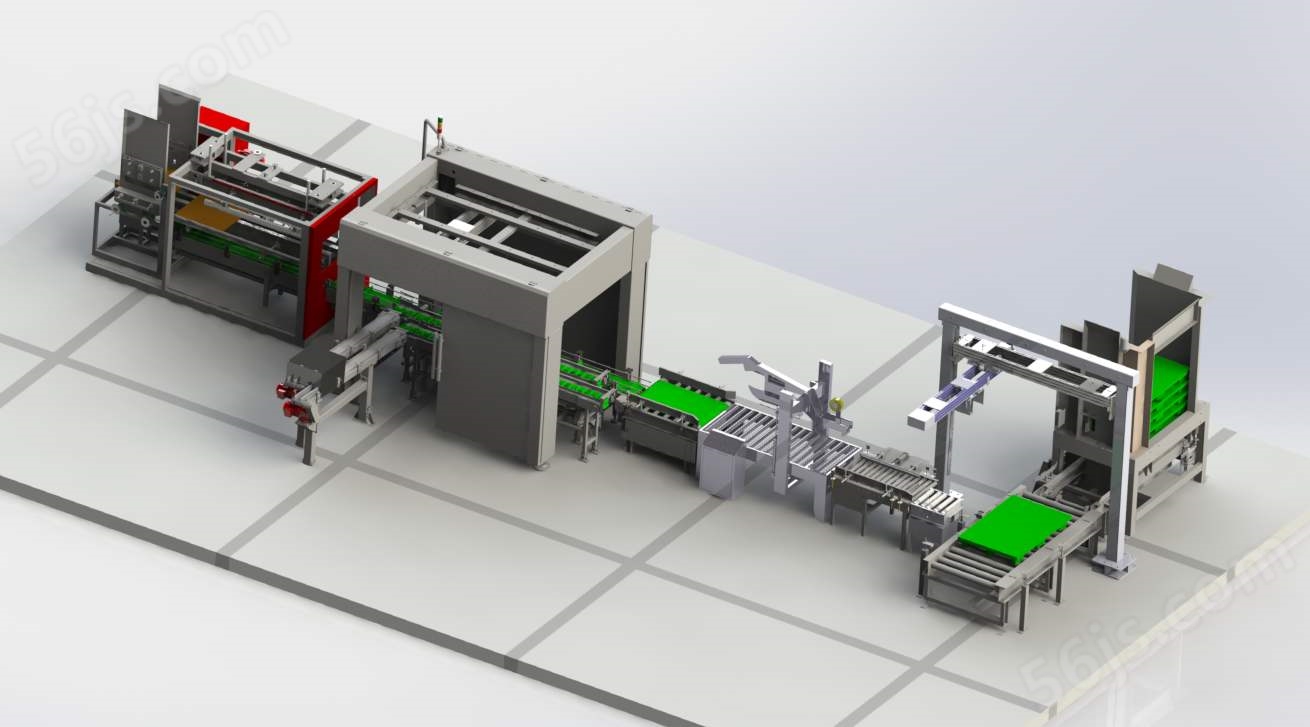
包装码垛机械手
品牌
其他厂商性质
上海市所在地
上海博卉包装机械有限公司
组合推荐相似产品
半自动小计量颗粒包装机
25公斤阀口袋包装机
全自动颗粒袋装机
机器人码垛 缠绕机
全自动粘(钉)箱联动生产线
全自动平压平模切机联动生产线
自动制袋组合称重包装机
Z26半自动大计量颗粒包装机
BH-Z25半自动大剂量颗粒包装机
全自动经济型颗粒袋装机
半自动颗粒计量包装机
半自动颗粒2斗包装机
首页
展台
留言
联系方式
请选择您要拨打的电话: