品牌
其他厂商性质
所在地

特点:
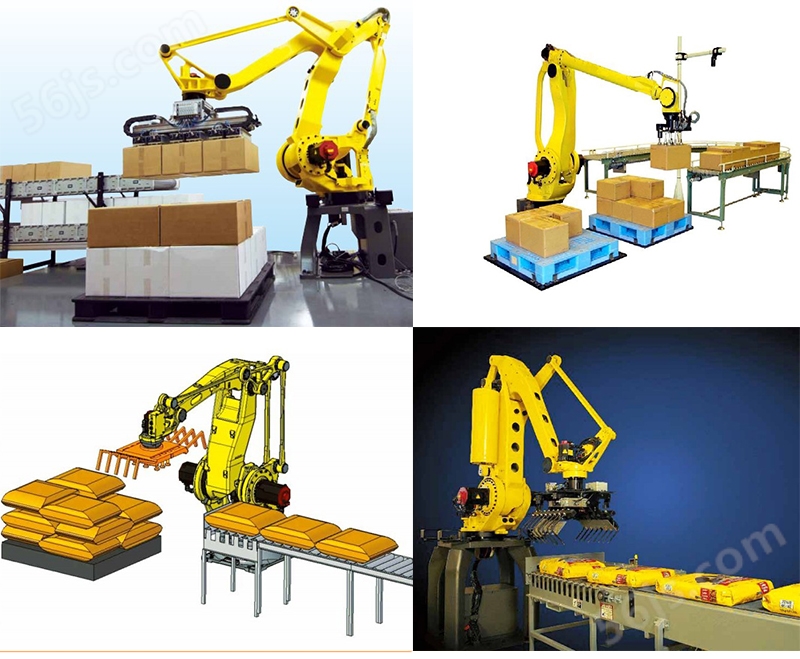
M-410iB系列智能码垛机器人为码垛系统的自动化做出了贡献。可根据工件选择合适的机器人类型。
M-410IB/140H型:140kg有效载荷,高速型;
M-410IB/160型:160kg有效载荷,高速型;
M-410IB/300型:300kg有效载荷,重型有效载荷类型;
M-410IB/450型:450kg有效载荷,重型有效载荷类型;
M-410IB/700型:700kg有效载荷,超重型有效载荷类型;
参数:
| 型号 | M-410iB/140H | ||||||
| 机构 | 多关节型机器人 | ||||||
| 控制轴数 | 5轴(J1、J2、J3、J4、J5) | ||||||
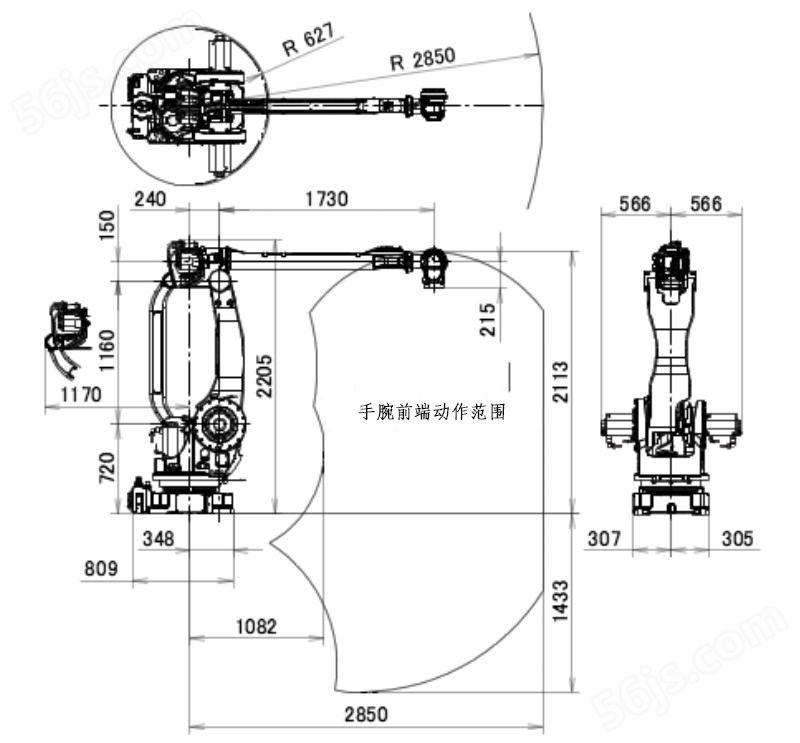
| 可达半径 | 2850mm | ||||||
| 安装方式 | 地面安装 | ||||||
| 动作范围(注释1) 速度 | J1 | 360º (140º/s) | J2 | 155º (115º/s) | J3 | 112º (135º/s) | |
| J4 | 20º (135º/s) | J5 | 720º (420º/s) |
|
| ||
| 手腕部运动速度 | 3000 mm/s | ||||||
| 手腕部负载 | 140kg | ||||||
| J2机座上负载 | 550 kg | ||||||
| J3手臂部负载(注释2) | 140kg | ||||||
| 手腕允许负载惯量 | J4 | 147 kgm² | J5 | 53 kgm² |
|
| |
| 驱动方式 | 交流伺服电机驱动 | ||||||
| 重复定位精度 | ± 0.2 mm | ||||||
| 机器人质量(注释3) | 1200 kg | ||||||
| 输入电源功率(平均功耗) | 15 kVA ( 3 kW ) | ||||||
| 安装条件 | 环境温度 : 0 ~ 45⁰C 环境湿度 : 通常在75% RH以下(无结露现象),短期在95% RH以下(1个月之内) 振动加速度: 4.9 m/s² (0.5G)以下
| ||||||
|
| 注释1)短距离运动时,可能达不到各轴的标称速度。 注释2)J3手臂部负载受腕部负载限制。 注释3)不含机器人控制器的质量。
| ||||||
动作范围: