品牌
其他厂商性质
南京市所在地
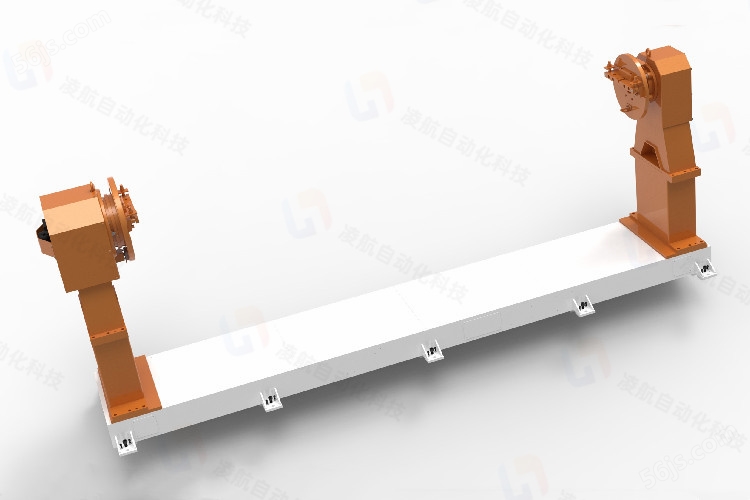
头尾架机器人焊接变位机:
头尾架机器人焊接变位机是指配合机器人机械手臂使用,改变产品摆放姿态、位置的自动化旋转/翻转装备,在机器人编程时将变位机的控制程序输入到机器人控制系统中,可以跟机器人实现协调运动,对机器人的灵活度进行补偿,提高工作效率。
头尾架机器人焊接变位机作为常见的焊接辅助设备,根据轴数不同,可实现360°翻转或者120°回转,并且根据负载能力不同,可以满足不同领域工件的承载,保证在承载范围内实现稳定翻转,工作台中配置固定孔,可以将工件进行固定回转和翻转,提高稳定性,焊接变位机和焊接机器人能够实现协调运动。
机器人焊接变位机的构成与应用主要是通过工作台的升降、回转、翻转等运动使工件处于焊接位置,有侧翻式、头尾式、升降式及双回转等多种结构形式。可与焊接操作架等配套组成自动焊接专机,还可与机器人等配套实现自动化焊接,同时可根据用户的工件和工艺要求,设计定制各种特制焊接变位机。
机器人焊接变位机特点:
1. 焊接精确度方面。焊缝自动跟踪技术可以提高焊接机器人对焊缝进行自动定位,对焊缝规格进行识别,控制系统通过焊缝的规格下达指令,执行机构通过对焊缝的寻找下放刚刚好的焊接材料进行填充,这样能够保证焊接精确度,稳定焊接质量。
2. 操作灵活度方面。焊接机器人作为焊接作业的自动化机械设备,比传统焊接更灵活一些,焊接变位机可以提高焊接机器人的灵活性,焊接作业在焊接单面焊件的时候,再焊接其他位置时,太远距离焊枪就可能达不到焊接位置,焊接变位机通过拖拽工件到焊枪的焊接范围内,帮助焊接机器人的灵活焊接。
3. 实现较远距离焊接。针对大型焊件和焊点较长的焊件,焊接机器人需要通过挪动位置进行焊接,焊接机器人通过加装轨道行走系统,可以延长焊接路径,实现较远距离的焊接。
焊接变位机机器人的辅助设备包括焊接机器人本体、焊接变位机、机器人移动地轨、焊缝自动跟踪系统等,焊接机器人和传统焊接较大的区别就是控制系统智能焊接、生产效率高、生产成本低,搭配辅助设备的焊接机器人在各方面都超过于单体焊接机器人。
头尾架变位机:
| 型号 | LH-2D-250 | LH-2D-500 | LH-2D-1000 | LH-2D-2000 | LH-2D-5000 |
| 负荷 | 250kg | 500kg | 1000kg | 2000kg | 5000kg |
| 控制轴数 | 1 | ||||
| 驱动方式 | AC Servo Motor | ||||
| 扭矩 | 270N.m | 526N.m | 1076N.m | 1711N.m | 3095N.m |
| 输入功率 | 1Kw | 1.5kw | 2kw | 3kw | 5kw |
| 速度 | 24r/min | 19r/min | 12r/min | 11r/min | 10r/min |
| 间距 | 3米 | 3米 | 5米 | 5米 | 5米 |